[VIP第1年] 指数:3
[VIP第1年] 指数:3
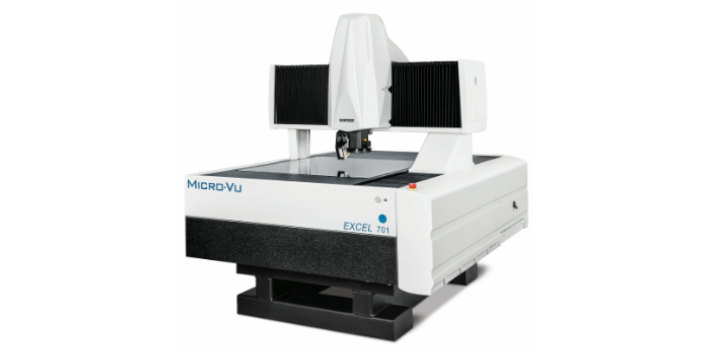
太阳能电池片是新能源产业中重要的产品之一。常规的丝网印刷网版印刷线型均匀性差,对追求高效率下更高更窄的线型已到瓶颈,二次印刷技术的对准和成本控制问题以及效率提升又无法令更多的客户满意。无网结网版不但消除了线型高低不平的现象,而且可以满足客户线宽做窄的需求,进一步减少遮光面积,对产线工艺优化和效率的提升起到至关重要的作用。据了解,无网结是目前**易实现30μm以下细线印刷的量产技术,也是银浆和设备**易配合的技术路径。而且随着副栅线开口降低到28μm甚至以下,传统的单次印刷和分布印刷对于无网结网版的需求越来越大。通过使用Micro-Vu高精度影像自动测量仪,利用影像放大、平面补正、自动寻边扫描,构建图形生成DXF格式档案等功能,完成测绘扫描的工作。苏州科贸时贸易有限公司为您提供三次元影像测量仪 ,期待您的光临!苏州提供三次元影像测量仪备件

与SPC相关的几个重要的概念:1.差异就像世界上没有两张完全相同的树叶一样,任何一个工厂,无论其生产技术多么先进,从其生产线出来的同一种产品或多或少总会存在一些差异,这种差异就是变差。比如,同一生产线生产出的一批合格螺栓,长度不可能做到完全一样。2.普通原因vs特殊原因:同样的道理,为什么两个相同的汉堡并不能保证其重量完全相等呢?这是因为制作汉堡的工艺流程不可能保证每一个汉堡的重量一样,总会存在一些细微差异。只不过作为顾客的我们能够接受这样的差异。我们把导致这种普遍的、固有的、可接受的变差的原因,叫做普通原因。但是如果哪天你买了两个同样的汉堡,却发现其中一个汉堡中间完全没有加蔬菜,这不再是常见的、普通的变差了,而是有某种特殊原因导致的变差,比如员工的操作失误。这种变差往往是顾客不能接受的。我们把导致这种非普遍的、非固有的、异常的变差的原因叫做特殊原因。3.受控vs不受控如果一个过程,只有普通原因引起的变差,我们就说这个过程受控。如果一个过程存在特殊原因引起的变差,我们就说这个过程不受控。控制图的作用就是帮助我们发现并消除导致过程变异的特殊原因,使过程从不受控变成受控。苏州三次元影像测量仪产品介绍三次元影像测量仪 ,就选苏州科贸时贸易有限公司。

三次元测量仪,主要是指通过三维取点来进行测量的一种仪器,市场上也有叫三坐标,三坐标测量机,三维坐标测量仪,三次元的。主要原理是:将被测物体置于三次元测量空间,可获得被测物体上各测点的坐标位置,根据这些点的空间坐标值,经计算求出被测物体的几何尺寸,形状和位置。基本原理就是通过探测传感器(探头)与测量空间轴线运动的配合,对被测几何元素进行离散的空间点位置的获取,然后通过一定的数学计算,完成对所测得点(点群)的分析拟合,还原出被测的几何元素,并在此基础上计算其与理论值(名义值)之间的偏差,从而完成对被测零件的检验工作。三次元坐标量测仪(CoordinateMeasuringMachine简称CMM),又称三次元量床,日本用语为三次元测定机,大陆用语为三维测量机或三坐标测量机。
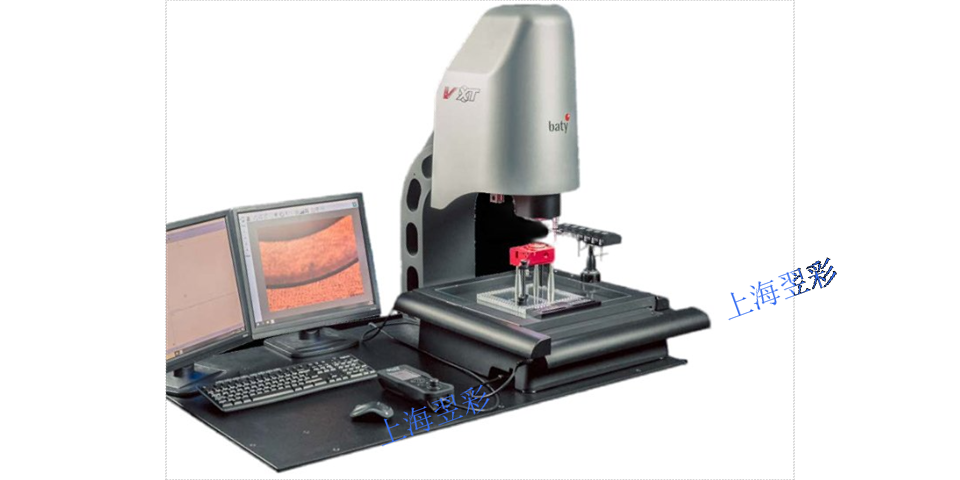
同时作为两项光学测量仪的新式技术产物,按常理来讲,二次元影像测量仪在运用上面真实比三次元要低些。必竟,三次元影像测量仪是在二次元影像测量仪的基础上开始进行变革的。然而是否表示着,二次元的商场将要被三次元代替呢?有很多的客户在购买时,也常常问到:咱们该买哪一款好呢?在这边,咱们做为仪器消费商,负责任的跟您讲,二次元和三次元都有各自的运用范围。并确定是二次元能用到的场合,三次元就确定能用上。在这边咱们仍旧再次廓清一下它们两者之间的辨别和用处。苏州科贸时贸易有限公司MICROVU影像测量仪。

三次元测量仪,主要是指通过三维取点来进行测量的一种仪器,市场上也有叫三坐标,三坐标测量机,三维坐标测量仪等。主要原理是:将被测物体置于三次元测量空间,可获得被测物体上各测点的坐标位置,根据这些点的空间坐标值,经计算求出被测物体的几何尺寸,形状和位置。基本原理就是通过探测传感器(探头)与测量空间轴线运动的配合,对被测几何元素进行离散的空间点位置的获取,然后通过一定的数学计算,完成对所测得点(点群)的分析拟合,较终还原出被测的几何元素,并在此基础上计算其与理论值(名义值)之间的偏差,从而完成对被测零件的检验工作。苏州科贸时贸易有限公司力于提供三次元影像测量仪 ,有想法的可以来电咨询!苏州三次元影像测量仪产品介绍
苏州科贸时贸易有限公司为您提供三次元影像测量仪 ,有想法的不要错过哦!苏州提供三次元影像测量仪备件
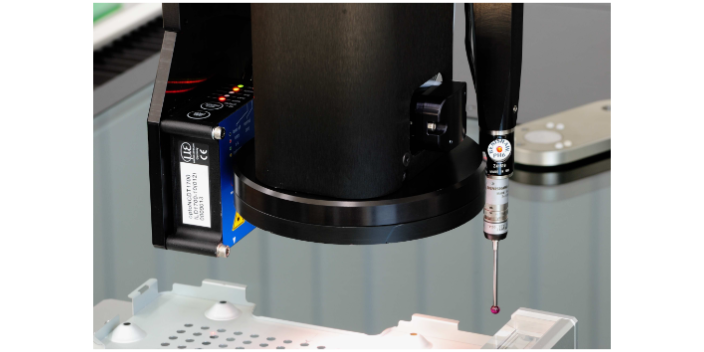
MICROVU公司致力于研发生产精密测量设备和精密智能装备。为国内制造业及院校、研究所提供测量技术及智能装备。公司秉着“立足于高科技,服务于企业”的宗旨,为客户提供“专业、及时、高效、”的服务。着力于高科技智能装备及精密测量仪器设备,加大科技研发,提高产品性能,加大新产品,新项目投入.Micro-Vu提供的激光传感器可单点聚焦和表面扫描,在测量高度,台阶,平面度以及轮廓度时相较于传统接触式采点测量,非接触式图像传感器都有很大的优势。根据零件材质和表面状况来区分,Micro-Vu**新版INSPEC软件开放PointCloud(点位簇)功能,在使用点扫描或线扫描采集到足够数量的样本点位后,您可以根据不同的的需求筛选出某一特定区域(立方体/圆柱体)内的点位,或只采集**大/**小的峰值点位,筛选的方式可以是输入三维坐标,鼠标拖动可视化的区域,直观高效。苏州提供三次元影像测量仪备件
文章来源地址: http://yiqiyibiao.chanpin818.com/gxyq/yxy/deta_20514570.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。