[VIP第1年] 指数:3
[VIP第1年] 指数:3
激光雷达标定板的激光雷达有哪些优势?1、方向性好:激光的准直性(mrad--urad)决定激光雷达测量方向的性;2、测量精度高:激光的短脉宽(ns),单谱线(nm)和高亮度(MW)决定激光雷达测量空间分辨率(m),时间分辨率(s)和探测精度(ppb)高;3、自动连续观测:现代激光技术、探测技术和计算机技术确保激光雷达实现自动连续观测,获取大气性质实时变化。通过探测激光与大气中各种分子和大气气溶胶等介质相互作用的辐射信号来反演大气性质,其测量原理涉及激光辐射与大气介质间相互作所产生的各种物理过程。按照不同原理区分,有差分吸收雷达、米散射雷达、拉曼雷达等等,激光雷达测量大气参数包括:气溶胶和云(能见度,不同波长散射和消光特性,偏振特性,整层光学厚度和大气透过率等),温度、密度(气压)、湿度(水汽含量),痕量气体含量(SO2、O3、CO2、CH4、NOx),风场等。激光雷达定标板的引入,极大地提高了激光雷达系统的校准效率和准确性。广州环光源均匀性分布测试用激光雷达测试板批发

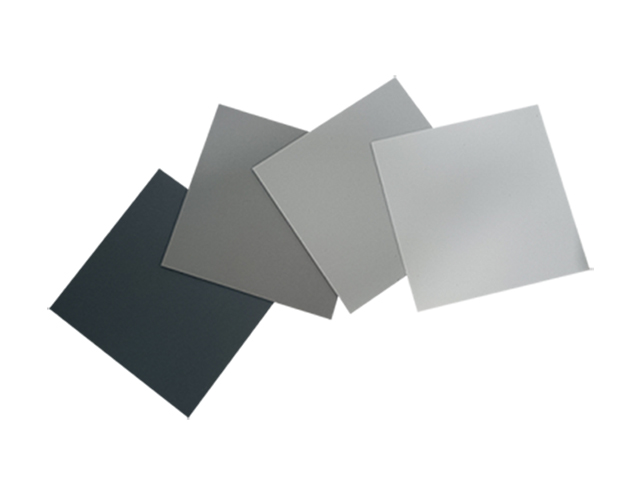
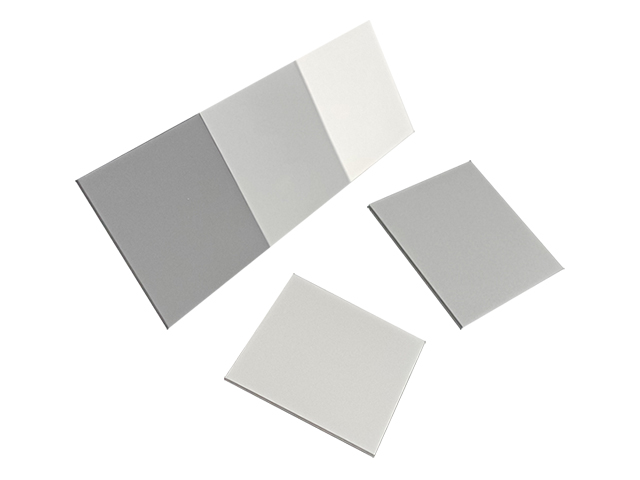
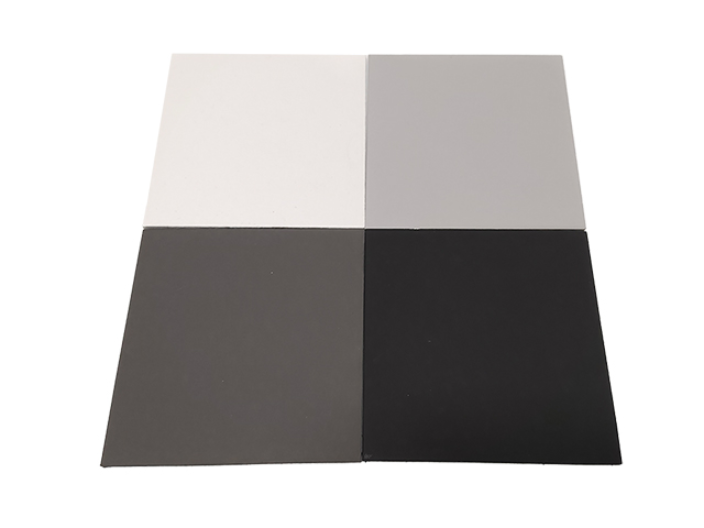
激光雷达通过反射率标定校准用来提高激光雷达传感器对物体以及距离的感知精度,反射率标定校准通过激光雷达标定板来实现。激光雷达反射率校准常用的是1mx1m尺寸的雷达标定板,此类雷达标定板完美的朗伯特性,不同于普通的颜料纸卡、涂料等,是标准的朗伯面。一般采用的低中高反射率组合来校准,常用的组合是10%+50%+90%这三个反射率,颜色黑(10%)灰(50%)白(90%)反射率由低向高过渡,905nm或1550nm等是常用的激光雷达测试波长。瑞科光电激光雷达标定板反射率涵盖了400-1700nm宽光谱范围,出厂附带反射率检测报告。远距离的测试还可以定制1.5mx3m或者更大尺寸的反射板。广州10%反射率激光测距板使用方法激光雷达定标板在无人驾驶汽车中的应用为其安全行驶提供了重要保障。

ADAS系统自动驾驶感知车载激光雷达定标板应用:智能驾驶技术一般可分为感知、决策、执行三个环节。线控底盘则是高阶层自动驾驶汽车执行环节的载体,线控底盘主要包括线控制动、线控转向、线控悬架、线控油门等系统部件。相较人工驾驶的普通汽车,智能网联汽车技术依赖于感知的输入、计算模型以及道路场景数据,需要通过大量的道路测试来不断的训练自动驾驶的场景遍历性。道路测试和示范应用可以验证车辆在限定区域范围内的实际运行能力和人机交互能力,还可以提升公众对于自动驾驶技术的认知度和信赖感,为即将到来的智能网联汽车自动驾驶功能规模化应用奠定基础,是智能网联汽车技术研发和迭代升级过程中不可逾越的步骤。具备城市复杂道路的全无人驾驶能力的无人驾驶汽车,有方向盘和没有方向盘两个模式,配备8颗激光雷达,不同于以往人们在马路上见到的自动驾驶改装车,较为惹眼的是,主驾驶座上没有方向盘时,人们坐在车里可以办公、K歌、打游戏,一边前往目的地。
随着激光雷达技术的不断进步和高速发展,激光雷达被普遍应用于汽车无人驾驶领域。激光雷达标定板使用波长范围可达200-2500mm,反射率可选2-99%;均匀性优,寿命长,防水,易清理,可以野外使用。激光雷达定标经常用到850nm、905nm、940nm、1064nm、1535nm等特种激光雷达测距校准。无论是校准车载激光雷达还是机载光谱成像系统,漫反射标定板都是较理想的选择。标定板常用来精确测试激光雷达不同波长下的距离灵敏度,以加快激光雷达系统的生产,应用于汽车无人驾驶、智能机器人、智能码头等行业。在建筑行业中,激光雷达定标板可用于建筑物的三维扫描和建模。

多反射率的激光雷达标定板:激光雷达是以发射激光束探测目标的位置、速度等特征量的雷达系统。其工作原理是向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后,就可获得目标的有关信息;如目标距离、方位、高度、速度、姿态、甚至形状等参数。激光雷达与其他普通的微波雷达相比,具有分辨率高、隐蔽性好、抗有源干扰才能强、低空探测性能好、体积小、质量轻等特点。在以激光雷达为主的自动驾驶传感器配置计划中,激光雷达是自动驾驶系统准确测距的重要部件。因此,激光雷达的距离感知能力非常重要。通过使用自动化激光雷达定标板识别系统,可提高生产线的效率和灵活性。广州10%反射率激光测距板使用方法
在航空航天领域,激光雷达定标板可用于机场跑道和飞机表面的高精度测量。广州环光源均匀性分布测试用激光雷达测试板批发
自动驾驶为什么需要激光雷达标定板?自动驾驶汽车又称为无人驾驶车,其本质就是高智能机器人,可以只需要驾驶员辅助或完全不需要驾驶员操作即可完成出行行为的高智能机器人。自动驾驶主要通过感知层、决策层及执行层来实现,作为自动化载具,自动驾驶汽车可以通过加装的雷达(激光雷达等)、车载摄像头、全球导航卫星系统(GNSS)、实时动态(PTK)、惯性测量单元(IMU)等硬件设备感知交通环境,并对探测到的交通环境进行判断,自动驾驶汽车可以根据探测到的交通环境进行行为决策和路径规划,继而对执行单元发送指令来操控自动驾驶汽车的行驶。广州环光源均匀性分布测试用激光雷达测试板批发
文章来源地址: http://yiqiyibiao.chanpin818.com/gxyq/qtgxyq/deta_21507866.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。