[VIP第1年] 指数:3
[VIP第1年] 指数:3
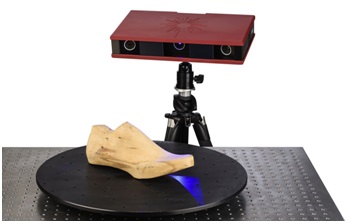
有两种类型的光学追踪标记点可与PST光学追踪系统一起使用:被动和主动标记,徐汇区的双目红外光学医学仪器。被动式光学追踪标记点由反光材料组成,它将射入的红外光反射回至光源。这种标记点有不同的尺寸,如扁平的圆形贴纸或球形。球形标记具有以下优点:它们可以反射来自追踪系统的各个角度的光,徐汇区的双目红外光学医学仪器,而平面标记点能反射与追踪系统成0到60度之间的角度的光。主动式光学追踪标记点为红外光二极管(LED)。这种标记点需要电线或电池来操作,并可直接发射红外光。因为它们不依赖于对接受到的红外光进行反射,例如反光射标记点,所以它们可以在距离追踪器更远的地方使用,从而可测量容积更大,徐汇区的双目红外光学医学仪器。对于大多数应用来说,都可使用被动标记点。它们能提供灵活的设置,并允许用户快速将普通物体转换为追踪设。青海双目红外光学技术,可以咨询位姿科技(上海)有限公司;徐汇区的双目红外光学医学仪器
近些年来,机器人行业发展迅速,机器人被广泛应用于各个领域尤其是工业领域,不难看出其巨大潜力。与此同时,我们也必须认识到机器人行业的蓬勃发展,离不开先进的科研进步和技术支撑。以下,我们将盘点机器人前沿技术,供大家参考。1.软体机器人——柔性机器人技术柔性机器人关阀门柔性机器人技术是指采用柔韧性材料进行机器人的研发、设计和制造。柔性材料具有能在大范围内任意改变自身形状的特点,在管道故障检查、医疗诊断、侦查探测领域具有广泛应用前景。2.机器人可变形——液态金属控制技术英国科学家通过编程控制液态金属液态金属控制技术指通过控制电磁场外部环境,对液态金属材料进行外观特征、运动状态准确控制的一种技术,可用于智能制造、灾后救援等领域。液态金属是一种不定型、可流动液体的金属,目前的技术重点主要集中在液态金属的铸造成型上,液态机器人还只是一个美好的愿景。3.生物信号可以控制机器人——生肌电控制技术意大利技术研究院研发的儿童机器人iCub生肌电控制技术利用人类上肢表面肌电信号来控制机器臂,在远程控制、医疗康复等领域有着较为广阔的应用。黄浦区的双目红外光学品牌有哪些双目红外光学医疗设备价格,可以咨询位姿科技(上海)有限公司;
单独把每个零件从装配图中拆出,或者把某个零件上的所有线条一起进行编辑。InputData项主要用于光学系统参数的输入并转化为数据文件以便于其它程序的取用。DrawLensOnly项用于不需要设计整个镜头结构时单独绘制光学系统图。SelectType项用于六种结构类型的选择。它调用了图标菜单ICON,将六种类型的结构简图用图像形式形象地显示出来,使用户很方便地选择所需要的结构类型,如图2所示。四、程序编制示例由图3系统框图可知,各个零件都编制了相应的子程序完成其结构绘制,下面以光学系统为例说明程序的编制过程。完成光学系统绘制的程序。首先从数据文件中取出组参数,利用绘图命令按照参数绘制透镜,然后循环操作取出第二组、第三组参数⋯,在距离前一透镜d+t处绘制透镜,直至整个透镜系统绘制完毕。五、关键技术处理1.镜筒壁厚和压圈宽度镜筒壁厚与它的直径有关。螺纹退刀槽处的镜筒壁厚一般是整个结构中的薄之处。因此程序中以退刀槽处为壁厚基准,各种直径范围的壁厚选择由条件语句完成。在台阶式结构中中间部分各处的壁厚都与退刀槽处的壁厚相等,而在直筒式结构中中间部分的壁厚要比退刀槽处的壁厚大一些。
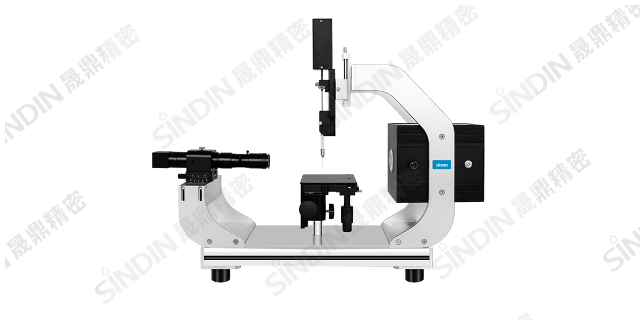
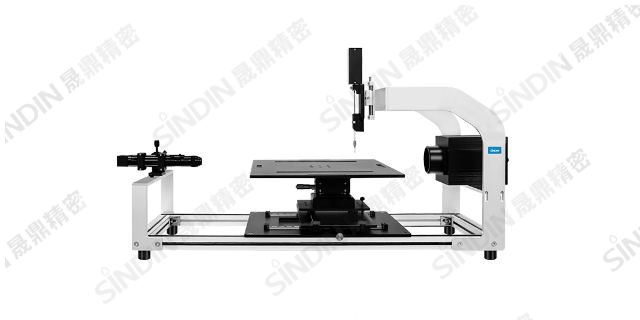
PSTBase光学定位导航系统PSTBase是为仿真解决方案打造的理想光学追踪系统PSTBase光学定位导航系统是专为满足追踪距离从20厘米至3米的用户需求而设计。PSTBase光学追踪系统适用于医疗仿真、工业仿真(汽车仿真、飞机驾驶舱模拟器)、手术导航、动作捕捉、机器视觉等领域。PST定位导航系列产品均为预校准、即插即用的高精度双目红外光学系统。每台PSTBase都是完全单独的追踪单元。可直接开箱使用,无需校准且捕捉摄像头无需进行注册。PSTBase的数据结果通过USB接口进行传输。也可通过以太网进行完全透明分享,只需在另外一台电脑上安装客户软件并进行连接。此外系统软件采用抗干扰算法,如抖动处理、有效屏蔽可见光环境干扰等,进一步保证了系统精度。系统软件采用图形化界面,具有3D建模、标记点编辑、6D工具制作、API接口等功能。天津双目红外光学技术,可以咨询位姿科技(上海)有限公司;
其定位精度约为40米量级。而通过对SAR遥感影像定位误差源的相关文献进行分析,本文借助基于有理多项式模型的无控立体平差模型和SAR遥感影像的时延校正模型,去除SAR遥感影像中存在的定位偏差,实验结果如表3-1和3-2所示。通过对上表结果进行分析可知,经过时延校正和立体平差后,三号SAR立体像对的定位精度可以达到3米左右。基于校正后的三号SAR立体像对和吉林一号多源光学遥感影像,以SAR立体像对中的匹配点作为虚拟控制点,建立多源光学/SAR遥感影像定位精度提升模型,并辅助以差异化权重设计策略,得到经过校正后的多源光学/SAR遥感影像的定位精度,并将该结果与常用的两种联合平差模型和融合校正模型处理前后的结果进行了比较,如表3-3所示。通过对表3-3的定位误差进行分析可知,本文所提出的多源光学/SAR遥感影像定位精度提升模型能够在相同条件下取得更优异的定位结果。同时,图3-2展示了定位精度提升后的光学/SAR遥感影像部分区域的融合结果图,可以看出经过处理后光学/SAR遥感影像之间的相对定位误差可以达到像素级。总结本文针对多源光学/SAR遥感影像定位精度提升问题,以有理多项式模型为基础,通过对光学遥感影像和SAR遥感影像的定位误差源进行分析。河北双目红外光学医疗设备价格,可以咨询位姿科技(上海)有限公司;徐汇区的双目红外光学医学仪器
北京双目红外光学医疗设备价格,可以咨询位姿科技(上海)有限公司;徐汇区的双目红外光学医学仪器
自动光圈电动变焦镜头与自动光圈定焦镜头相比增加了两个微型电机,其中一个电机与镜头的变焦环合,当其转动时可以控制镜头的焦距;另一电机与镜头的对焦环合,当其受控转动时可完成镜头的对焦。但是由于增加了两个电机且镜片组数增多,镜头的体积也相应增大。电动三可变镜头与自动光圈电动变焦镜头相比,只是将对光圈调整电机的控制由自动控制改为由d2c0ca8a-f532-4205-9366-8来手动控制。按焦距分类(约50度左右),广角镜头和特广角镜头(100-120度)标准镜头视角约50度,也是人单眼在头和眼不转动的情况下所能看到的视角,所以又称为标准镜头。5mm相机的标准镜头的焦距多为40mm,50mm或55mm。120相机的标准镜头焦距多为80mm或75mm。CCD芯片越大则标准镜头的焦距越长。广角镜头视角90度以上,适用于拍摄距离近且范围大的景物,又能刻意夸大前景表现强烈远近感即。35mm相机的典型广角镜头是焦距28mm,视角为72度。120相机的50,40mm的镜头便相当于35mm相机的35,28mm的镜头.长焦距镜头适于拍摄距离远的景物,景深小容易使背景模糊主体突出,但体积笨重且对动态主体对焦不易。35mm相机长焦距镜头通常分为三级,135mm以下称中焦距,135-500mm称长焦距。徐汇区的双目红外光学医学仪器
位姿科技(上海)有限公司位于上海市奉贤区星火开发区莲塘路251号8幢。公司自成立以来,以质量为发展,让匠心弥散在每个细节,公司旗下光学定位,光学导航,双目红外光学,光学追踪深受客户的喜爱。公司秉持诚信为本的经营理念,在数码、电脑深耕多年,以技术为先导,以自主产品为重点,发挥人才优势,打造数码、电脑良好品牌。位姿科技立足于全国市场,依托强大的研发实力,融合前沿的技术理念,飞快响应客户的变化需求。
文章来源地址: http://yiqiyibiao.chanpin818.com/gxyq/qtgxyq/deta_10028411.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。