[VIP第1年] 指数:3
[VIP第1年] 指数:3
陀螺仪的特性。接下来,我们用图来说说陀螺仪的特性。“陀螺仪”是敏感角位移的装置,重要特性有定轴性和进动性。定轴性。定轴性很好理解,陀螺仪在高速旋转过程中具有动量矩H,在不受外力矩作用时,自转轴将相对惯性空间保持方向不变的特性。进动性。进动性是二自由度陀螺仪里面的概念。二自由度陀螺仪模型如下:陀螺仪。外框能够绕外框轴旋转,内框能够绕内框轴旋转,中间是旋转的陀螺和自转轴。进动性是指的这样的现象:陀螺仪,在陀螺转子高速转动的情况下,如果按如图所示用力作用于内框架,会使得外框架按如图所示方向转动,从而导致动量矩H(即自转轴的方向)相应转动。或者另外一种情况:陀螺仪,用力推动外框,使得内框架绕内框轴转动。类似于牛顿第三定律,当推动外框架或者内框架改变动量矩H的方向时,陀螺仪会产生反作用力矩,其大小与外力矩相等,方向相反。这也是陀螺仪的基本特性之一。陀螺仪作为现代导航和控制技术中的重要组成部分,为多个领域的精确测量和定位提供了不可或缺的支持。自动化采煤航姿仪工作原理

明白了科里奥利力,就可以来说说微机电陀螺仪了。微机电陀螺仪内的主体就是一个质量块,这个质量块会在交替变化的电压作用下做来回振荡运动,这种运动本质上就是一种直线运动,当陀螺仪开始转动时,受科里奥利力的影响,这个水平振荡的陀螺仪就会发生偏转,也就是说此时它不只有水平运动,还有垂直运动。运动方式的改变会使电容值发生微小的变化,而通过感知这种微小的变化就可以了解物体姿态的变化。当然,单个微机电陀螺仪只能感知一个方向上的姿态变化,但在手机中装上两三个,就能够全方面准确识别手机的姿态,毕竟这个东西很小,也不占什么地方。云南航姿仪工作原理船舶导航系统中,陀螺仪可提供精确的方向信息,帮助船舶避开暗礁和浅滩。

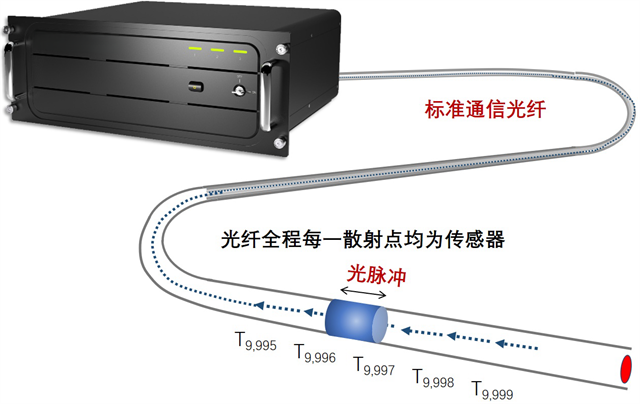
现代光纤陀螺仪包括干涉式陀螺仪和谐振式陀螺仪两种,它们都是根据塞格尼克的理论发展起来的。塞格尼克理论的要点是这样的:当光束在一个环形的通道中前进时,如果环形通道本身具有一个转动速度,那么光线沿着通道转动的方向前进所需要的时间要比沿着这个通道转动相反的方向前进所需要的时间要多。也就是说当光学环路转动时,在不同的前进方向上,光学环路的光程相对于环路在静止时的光程都会产生变化。利用这种光程的变化,如果使不同方向上前进的光之间产生干涉来测量环路的转动速度,就可以制造出干涉式光纤陀螺仪,如果利用这种环路光程的变化来实现在环路中不断循环的光之间的干涉,也就是通过调整光纤环路的光的谐振频率进而测量环路的转动速度,就可以制造出谐振式的光纤陀螺仪。从这个简单的介绍可以看出,干涉式陀螺仪在实现干涉时的光程差小,所以它所要求的光源可以有较大的频谱宽度,而谐振式的陀螺仪在实现干涉时,它的光程差较大,所以它所要求的光源必须有很好的单色性。
现在智能手机上采用的陀螺仪是MEMS(微机电)陀螺仪,手机中陀螺仪的运用首先用在游戏的控制上,相比传统重力感应器只能感应左右两个维度的(多轴的重力感应是可以检测到物体竖直方向的转动,但角度难判断)变化,陀螺仪通过对偏转、倾斜等动作角速度的测量,可以实现用手控制游戏主角的视野和方向。可以帮助手机摄像头防抖。在我们按下快门时,陀螺仪测量出手机翻转的角度,将手抖产生的偏差反馈给图像处理器,用计算出的结果控制补偿镜片组,对镜头的抖动方向以及位移作出补偿,实现更清晰的拍照效果。地下勘探、隧道挖掘等领域,陀螺仪有助于精确测量地下的空间结构和方向。

主要工作原理:角动量守恒定律,角动量守恒定律是指系统所受合外力矩为零时系统的角动量保持不变。角动量的定义:物体矢径和其动量的叉积:(1)矢量的计算:叉积和点积,假设a、b为两个矢量,之间的夹角为θ,则点积:a · b = abcosθ(标量),叉积:a x b = absinθ(矢量,方向由右手螺旋定则决定,四指由a弯向b,大拇指方向即为叉积方向)。(2)角动量计算:物体矢径和动量的叉积,r为矢径,数值为物体到旋转中心的距离,方向为旋转中心指向物体的方向矢量;p为动量,数值为物体质量与线速度的乘积p=mv,方向为线速度v的方向;以该图的方向为例,依据角动量公式,可以得到角动量L的方向为竖直向上。(3)陀螺的角动量守恒,假设一个陀螺不受空气阻力(合外力力矩=0),陀螺与地面的接触面无限小(矢径=0),则角动量的合力矩为0,即角动量守恒。陀螺仪的工作原理是基于角动量守恒定律,即物体在没有外力作用下,角动量保持不变。自动化采煤航姿仪工作原理
陀螺仪可以用于船舶和航空器的姿态稳定控制,提高航行的安全性和稳定性。自动化采煤航姿仪工作原理
陀螺仪的基本部件包括:1、陀螺转子(常采用同步电机、磁滞电机、三相交流电机等拖动方法来使陀螺转子绕自转轴高速旋转,并见其转速近似为常值)。2、内、外框架(或称内、外环,它是使陀螺自转轴获得所需角转动自由度的结构)。3、附件(是指力矩马达、信号传感器等)。陀螺仪的两个重要特性,陀螺仪有两个非常重要的基本特性:一为定轴性,另一是进动性,这两种特性都是建立在角动量守恒的原则下。定轴性,当陀螺转子以高速旋转时,在没有任何外力矩作用在陀螺仪上时,陀螺仪的自转轴在惯性空间中的指向保持稳定不变,即指向一个固定的方向;同时反抗任何改变转子轴向的力量。这种物理现象称为陀螺仪的定轴性或稳定性。自动化采煤航姿仪工作原理
文章来源地址: http://yiqiyibiao.chanpin818.com/dzclyq/qtdzclyq/deta_25376864.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。